

Para insinyur mengikuti kompetisi untuk menguji prototipe robotik untuk konsep misi yang ambisius—sekumpulan penjelajah bawah air yang mencari tanda-tanda kehidupan di dunia lautan yang asing.
Europa will deploy advanced robots to probe its icy oceans for life. The robots, part of the SWIM project, have been rigorously tested on Earth and through simulations to handle extraterrestrial conditions.
Exploring Europa: NASA’s Ambitious Mission
When NASA’s Europa Clipper arrives at Jupiter’s moon Europa in 2030, it will conduct 49 flybys, using a suite of powerful scientific instruments to search for evidence that the ocean beneath Europa’s icy crust could support life. The spacecraft, which launched on October 14, is equipped with the most advanced science technology ever sent to the outer solar system. Yet, even as it begins its mission, NASA teams are already designing the next generation of robotic explorers to dive deeper into Europa’s hidden ocean and beyond, pushing the boundaries of scientific discovery.
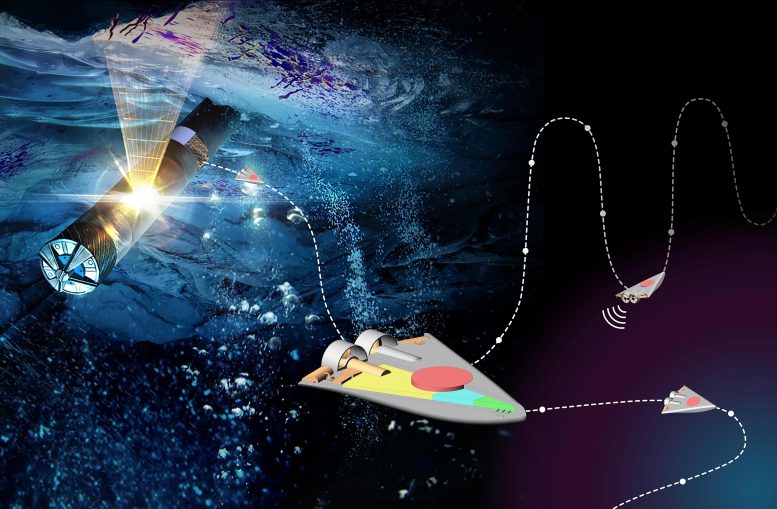
One such innovative concept is called SWIM, short for Sensing With Independent Micro-swimmers. This project imagines deploying a swarm of tiny, self-propelled robots, each about the size of a cellphone. These robots would be delivered to the subsurface ocean by an ice-melting cryobot. Once released, they would scatter and explore, searching for chemical and temperature signals that could point to the presence of life.

“People might ask, why is NASA developing an underwater robot for space exploration? It’s because there are places we want to go in the solar system to look for life, and we think life needs water. So we need robots that can explore those environments — autonomously, hundreds of millions of miles from home,” said Ethan Schaler, principal investigator for SWIM at NASA’s Jet Propulsion Laboratory in Southern California.
Under development at JPL, a series of prototypes for the SWIM concept recently braved the waters of a 25-yard (23-meter) competition swimming pool at Caltech in Pasadena for testing. The results were encouraging.
Sebuah prototipe robot yang dirancang untuk menjelajahi lautan bawah permukaan bulan-bulan es tercermin di permukaan air selama uji coba di Caltech pada bulan September. Dilakukan oleh Jet Propulsion Laboratory NASA, pengujian tersebut menunjukkan kelayakan konsep misi untuk segerombolan robot renang mini. Kredit: NASA/JPL-Caltech
Latihan BERENANG
Versi terbaru tim SWIM adalah prototipe plastik cetak 3D yang mengandalkan motor dan elektronik komersial berbiaya rendah. Didorong oleh dua baling-baling, dengan empat penutup untuk kemudi, prototipe ini menunjukkan manuver yang terkendali, kemampuan untuk tetap melaju dan memperbaiki jalurnya, dan pola eksplorasi “mesin pemotong rumput” bolak-balik. Semua ini dikelola secara mandiri, tanpa intervensi langsung dari tim. Robot itu bahkan mengeja “JPL.”
Untuk berjaga-jaga jika robot tersebut perlu diselamatkan, robot tersebut dipasang pada tali pancing, dan seorang insinyur yang membawa pancing berlari di sepanjang kolam selama setiap pengujian. Di dekatnya, seorang rekan meninjau tindakan robot dan data sensor di laptop. Tim menyelesaikan lebih dari 20 putaran pengujian berbagai prototipe di kolam renang dan sepasang tank di JPL.
“Sungguh luar biasa membuat robot dari awal dan melihatnya berhasil beroperasi di lingkungan yang relevan,” kata Schaler. “Robot bawah air pada umumnya sangat keras, dan ini hanyalah yang pertama dari serangkaian desain yang harus kami kerjakan untuk mempersiapkan perjalanan ke dunia lautan. Namun ini adalah bukti bahwa kita dapat membangun robot-robot ini dengan kemampuan yang diperlukan dan mulai memahami tantangan apa yang akan mereka hadapi dalam misi bawah permukaan.”

Menuju Eksplorasi Kelautan Otonom
Prototipe berbentuk baji yang digunakan di sebagian besar pengujian kolam renang memiliki panjang sekitar 16,5 inci (42 sentimeter), dan berat 5 pon (2,3 kilogram). Seperti yang direncanakan untuk penerbangan luar angkasa, robot-robot tersebut akan memiliki dimensi sekitar tiga kali lebih kecil – lebih kecil dibandingkan dengan kendaraan ilmiah bawah air yang dioperasikan dari jarak jauh dan otonom. Perenang seukuran telapak tangan akan menampilkan bagian-bagian mini yang dibuat khusus dan menggunakan sistem komunikasi akustik bawah air nirkabel baru untuk mentransmisikan data dan melakukan triangulasi posisi mereka.
Versi digital dari robot-robot kecil ini mendapat pengujiannya sendiri, bukan di kolam tetapi dalam simulasi komputer. Dalam lingkungan dengan tekanan dan gravitasi yang sama dengan yang mungkin mereka temui di Europa, segerombolan robot berukuran panjang 5 inci (12 sentimeter) berulang kali mencari tanda-tanda kehidupan yang potensial. Simulasi komputer membantu menentukan batas kemampuan robot untuk mengumpulkan data sains di lingkungan yang tidak diketahui, dan mengarah pada pengembangan algoritma yang memungkinkan kawanan robot melakukan eksplorasi dengan lebih efisien.

Simulasi ini juga membantu tim lebih memahami cara memaksimalkan manfaat ilmu pengetahuan sambil memperhitungkan keseimbangan antara masa pakai baterai (hingga dua jam), volume air yang dapat dijelajahi oleh perenang (sekitar 3 juta kaki kubik, atau 86.000 meter kubik), dan air. jumlah robot dalam satu gerombolan (selusin, dikirim dalam empat hingga lima gelombang).
Selain itu, tim kolaborator di Georgia Tech di Atlanta membuat dan menguji sensor komposisi lautan yang memungkinkan setiap robot mengukur suhu, tekanan, keasaman atau alkalinitas, konduktivitas, dan susunan kimia secara bersamaan. Hanya berukuran beberapa milimeter persegi, chip ini adalah yang pertama menggabungkan semua sensor tersebut dalam satu paket kecil.
Tentu saja, konsep canggih seperti itu memerlukan pengerjaan beberapa tahun lagi, antara lain, agar siap untuk kemungkinan misi penerbangan di masa depan ke bulan es. Sementara itu, Schaler membayangkan robot SWIM berpotensi dikembangkan lebih lanjut untuk melakukan pekerjaan sains di negaranya: mendukung penelitian oseanografi atau melakukan pengukuran penting di bawah es kutub.

Lebih Lanjut Tentang BERENANG
SWIM adalah proyek inovatif NASA yang dikelola oleh Jet Propulsion Laboratory (JPL) Caltech dan didanai melalui program Innovative Advanced Concepts (NIAC) NASA, yang menumbuhkan ide-ide visioner untuk eksplorasi ruang angkasa di masa depan. Proyek ini membayangkan sekumpulan robot renang kecil otonom yang dirancang untuk menjelajahi lautan bawah permukaan di bulan-bulan es, seperti Europa, untuk mencari tanda-tanda kehidupan. Robot seukuran ponsel ini, yang dikirimkan oleh cryobot pencair es, akan menyebar untuk mendeteksi sinyal kimia dan suhu yang dapat mengindikasikan kelayakan huni atau kehidupan.
Didukung oleh pendanaan NIAC Tahap I dan II di bawah Direktorat Misi Teknologi Luar Angkasa NASA, SWIM adalah bagian dari program yang mengevaluasi teknologi mutakhir yang mampu mengubah misi masa depan. Para peneliti dari pemerintah, industri, dan akademisi AS didorong untuk menyumbangkan proposal pada inisiatif ini, memajukan batas-batas eksplorasi ruang angkasa dan ruang angkasa.



