
AI dan Exoskeleton Bekerja Sama untuk Mengubah Kinerja Manusia di Bumi dan Luar Angkasa

Para peneliti telah mengembangkan pengontrol eksoskeleton yang disempurnakan dengan AI yang belajar mendukung berbagai gerakan seperti berjalan dan berlari tanpa kalibrasi particular person. Sistem ini mengurangi pengeluaran energi secara signifikan, menjadikannya alat yang menjanjikan untuk meningkatkan mobilitas manusia secara efisien.
Pengontrol AI baru untuk exoskeleton, yang mampu mempelajari berbagai gerakan manusia tanpa pemrograman khusus, telah menunjukkan penghematan energi yang besar, menandai langkah maju yang besar dalam teknologi robotic yang dapat dikenakan.
Bayangkan pergerakan yang lebih aman dan efisien bagi pekerja pabrik dan astronot, serta peningkatan mobilitas bagi penyandang disabilitas. Suatu hari nanti hal ini bisa menjadi kenyataan yang lebih luas, berkat penelitian baru yang diterbitkan pada 12 Juni di jurnal tersebut Alam.
Disebut “exoskeletons,” kerangka robotic yang dapat dipakai untuk tubuh manusia menjanjikan pergerakan yang lebih mudah, namun kendala teknologi telah membatasi penerapannya secara lebih luas, jelas Dr. Shuzhen Luo dari Universitas Penerbangan Embry-Riddle — penulis pertama Alam makalah, dengan penulis koresponden Dr. Hao Su dari Universitas Negeri Carolina Utara (NC State) dan rekan lainnya.
Hingga saat ini, eksoskeleton harus diprogram terlebih dahulu untuk aktivitas dan individu tertentu, berdasarkan pengujian yang memakan waktu lama, mahal, dan padat karya dengan subjek manusia, kata Luo.
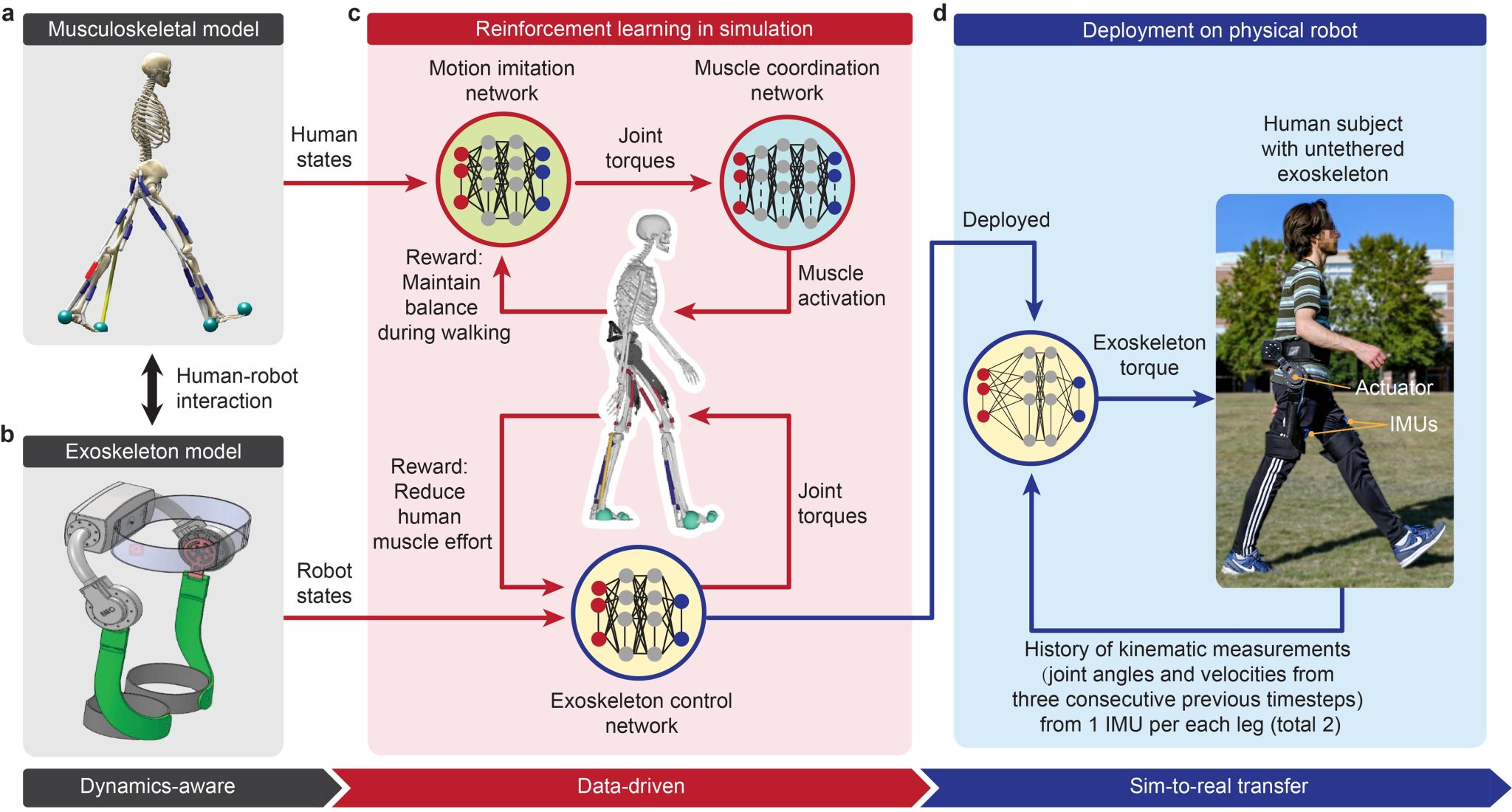
Para peneliti mengembangkan mannequin muskuloskeletal manusia seluruh tubuh yang terdiri dari 208 otot (kiri atas), serta kerangka luar pinggul khusus (kiri bawah), kemudian memanfaatkan kecerdasan buatan untuk mensimulasikan berbagai aktivitas (tengah) sebelum menerapkan pengontrol yang dipelajari pada subjek manusia. Kredit: AlamLuo dkk., Gambar 2.
Memperkenalkan Kontrol Bertenaga AI
Kini, para peneliti telah mendeskripsikan pengontrol tremendous cerdas atau “terpelajar” yang memanfaatkan information secara intensif kecerdasan buatan (AI) dan simulasi komputer untuk melatih kerangka luar robotic portabel.
“Pengontrol baru ini memberikan bantuan torsi yang mulus dan berkelanjutan untuk berjalan, berlari, atau menaiki tangga tanpa memerlukan pengujian yang melibatkan manusia,” lapor Luo. “Dengan hanya satu unit pemrosesan grafis yang dijalankan, kita dapat melatih hukum kontrol atau `kebijakan' dalam simulasi, sehingga pengontrol dapat secara efektif membantu ketiga aktivitas dan berbagai individu.”

Shuzhen Luo dari Embry-Riddle Aeronautical College (kanan), yang karyanya muncul di “Nature” pada 12 Juni 2024, membahas penelitiannya terkait kerangka luar robotic bertenaga AI, selama presentasi poster inner. Kredit: Embry-Riddle/David Massey
Pengurangan Energi Revolusioner
Didorong oleh tiga jaringan saraf berlapis-lapis yang saling berhubungan, pengontrol belajar seiring berjalannya waktu – berkembang melalui “jutaan zaman simulasi muskuloskeletal untuk meningkatkan mobilitas manusia,” jelas Dr. Luo, asisten profesor Teknik Mesin di Pantai Daytona Embry-Riddle, Florida, kampus.
Kerangka kerja “learning-in-simulation” yang bebas eksperimen, yang diterapkan pada rangka luar pinggul khusus, menghasilkan pengurangan laju metabolisme tertinggi pada rangka luar pinggul portabel hingga saat ini — dengan rata-rata sebesar 24,3%, 13,1%, dan 15,4 % pengurangan pengeluaran energi oleh pemakainya, masing-masing untuk berjalan, berlari, dan menaiki tangga.
Tingkat pengurangan energi ini dihitung dengan membandingkan kinerja subjek manusia dengan dan tanpa kerangka luar robotic, jelas Su dari NC State. “Artinya, ini adalah ukuran sebenarnya dari seberapa banyak energi yang dihemat oleh exoskeleton,” kata Su, profesor Teknik Mesin dan Dirgantara. “Karya ini pada dasarnya membuat fiksi ilmiah menjadi kenyataan – memungkinkan orang membakar lebih sedikit energi saat melakukan berbagai tugas.”
Menjembatani Kesenjangan Simulasi-ke-Realitas
Pendekatan ini diyakini sebagai pendekatan pertama yang menunjukkan kelayakan pengembangan pengontrol, dalam simulasi, yang menjembatani apa yang disebut simulasi-ke-realitas, atau “sim2real hole” sekaligus meningkatkan kinerja manusia secara signifikan.
“Pencapaian sebelumnya dalam pembelajaran penguatan cenderung berfokus terutama pada simulasi dan permainan papan,” kata Luo, “sedangkan kami mengusulkan metode baru — yaitu, cara pembelajaran penguatan berbasis information yang sadar dinamis untuk melatih dan mengendalikan robotic yang dapat dipakai untuk secara langsung bermanfaat bagi manusia.”
Kerangka kerja ini “dapat menawarkan strategi yang dapat digeneralisasikan dan terukur untuk penerapan berbagai robotic bantu secara cepat dan luas, baik untuk individu yang berbadan sehat maupun dengan gangguan mobilitas,” tambah Su.
Mengatasi Hambatan Teknologi
Sebagaimana dicatat, exoskeleton secara tradisional memerlukan undang-undang kontrol buatan tangan berdasarkan tes manusia yang memakan waktu untuk menangani setiap aktivitas dan memperhitungkan perbedaan dalam gaya berjalan individu, jelas para peneliti dalam jurnal tersebut. Alam. Pendekatan pembelajaran dalam simulasi menyarankan solusi yang mungkin untuk mengatasi hambatan-hambatan tersebut.
“Pendekatan pembelajaran penguatan berbasis information dan sadar dinamika” yang dihasilkan secara dramatis mempercepat pengembangan kerangka luar untuk diadopsi di dunia nyata, kata Luo. Simulasi loop tertutup menggabungkan pengontrol exoskeleton dan mannequin fisika dinamika muskuloskeletal, interaksi manusia-robot, dan reaksi otot untuk menghasilkan information yang efisien dan realistis. Dengan cara ini, kebijakan pengendalian dapat berkembang atau dipelajari dalam simulasi.
“Metode kami memberikan landasan bagi solusi siap pakai dalam pengembangan pengontrol untuk robotic yang dapat dipakai,” kata Luo.
Arah Masa Depan dalam Penelitian Exoskeleton
Penelitian di masa depan akan fokus pada cara berjalan yang unik, untuk berjalan, berlari, atau menaiki tangga, untuk membantu orang-orang yang memiliki disabilitas seperti stroke, osteoartritis, dan palsi serebral serta mereka yang diamputasi.
Untuk mengetahui lebih lanjut mengenai penelitian ini, lihat Setelan Robotic yang Menggunakan AI untuk Membantu Anda Berlari Lebih Mudah dan Lebih Cepat.
Referensi: “Bantuan exoskeleton bebas eksperimen melalui pembelajaran dalam simulasi” oleh Shuzhen Luo, Menghan Jiang, Sainan Zhang, Junxi Zhu, Shuangyue Yu, Israel Dominguez Silva, Tian Wang, Elliott Rouse, Bolei Zhou, Hyunwoo Yuk, Xianlian Zhou dan Hao Su , 12 Juni 2024, Alam.
DOI: 10.1038/s41586-024-07382-4
Itu Alam makalah ini ditulis oleh Shuzhen Luo dari Embry-Riddle Aeronautical College, bersama Menghan Jiang, Sainan Zhang, Junxi Zhu, Shuangyue Yu, Israel Dominguez Silva dan Tian Wang dari North Carolina State College; dan penulis koresponden Hao Su dari North Carolina State College dan College of North Carolina di Chapel Hill; Elliott Rouse dari Universitas Michigan, Ann Arbor; Bolei Zhou dari Universitas California, Los Angeles; Hyunwoo Yuk dari Institut Sains dan Teknologi Tingkat Lanjut Korea; dan Xianlian Zhou dari Institut Teknologi New Jersey.
Yufeng Kevin Chen dari Massachusetts Institute of Know-how memberikan masukan konstruktif untuk mendukung makalah, “Bantuan exoskeleton bebas eksperimen melalui pembelajaran dalam simulasi.”
Penelitian ini didukung sebagian oleh penghargaan KARIR Nationwide Science Basis (NSF) (CMMI 1944655); Lembaga Penelitian Nasional Disabilitas, Kehidupan Mandiri dan Rehabilitasi (DRRP 90DPGE0019); seorang Rekan Terhormat Penelitian Swiss (SFGE22000372); Pekerjaan Masa Depan NSF (2026622); dan itu Institut Kesehatan Nasional (1R01EB035404).
Sesuai dengan kebijakan publikasi “Nature”, setiap potensi “kepentingan yang bersaing” diungkapkan dalam makalah tersebut. Su dan Luo, mantan peneliti pascadoktoral di NC State yang sekarang bekerja di fakultas Embry-Riddle, adalah salah satu penemu kekayaan intelektual terkait pengontrol yang dijelaskan di sini.



